Aerial Manipulator with Center of Gravity Compensation

Aerial Manipulator Design I
Published:
https://www.mdpi.com/2076-3417/12/3/1173
This was my senior design project at the American University of Sharjah. It is an aerial manipulation system with a 3 degree of freedom robotic arm and a counterbalance mechanism. The counterbalance mechanism ensures that a constant center of gravity is held which keeps the system balanced while operating.
The manipulator can carry 250g of payload within a large workspace and has a unique design based on topology optimization which minimizes the mass of the manipulator while maintaining its strength.
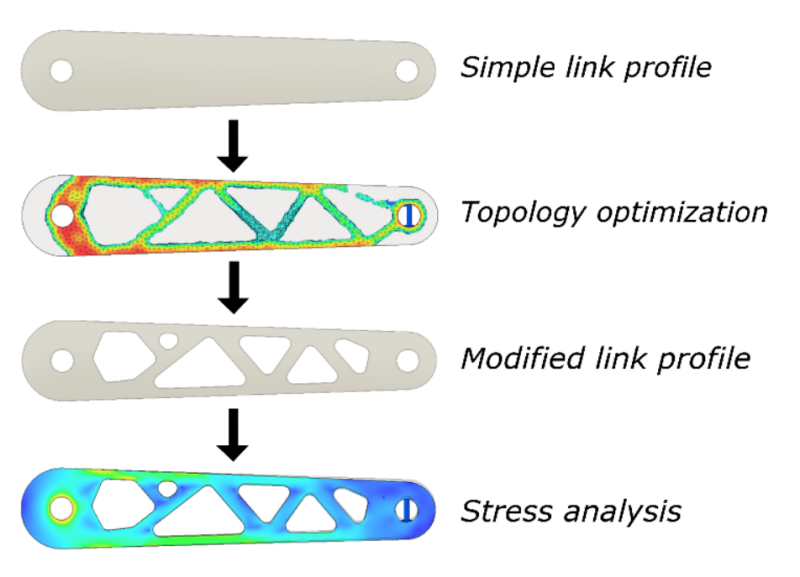

Link Design Process

Test results showcasing balancing system activated (left) vs deactivated (right)



This was my research design project at the American University of Sharjah. It is an aerial manipulation system using a 5 link kinematic model and a counterbalance mechanism. The counterbalance mechanism ensures that a constant center of gravity is held which keeps the system balanced while operating.
The manipulator carries a rolling brush as the end effector which is used for solar panel cleaning. The design is based on topology optimization which minimizes the mass of the manipulator while maintaining its strength.
Topology Optimized Base Design


Create Your Own Website With Webador