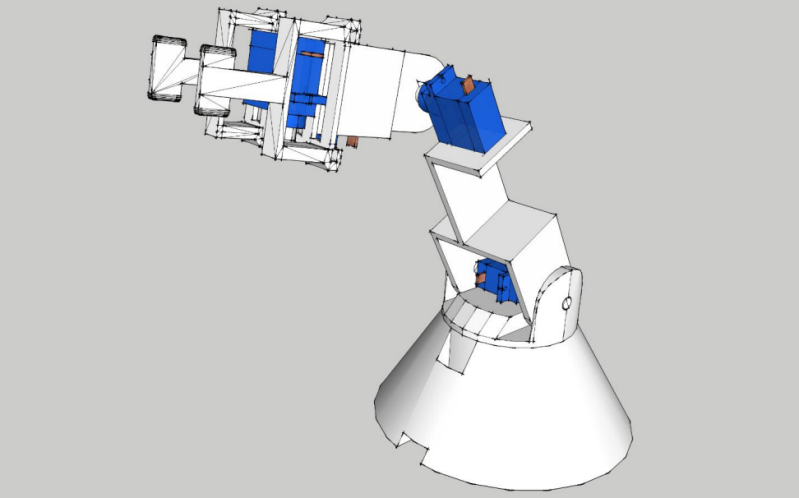
This is a 5 degree of freedom robot controlled using an Arduino microcontroller. It uses 5 standard hobby servo motors controlled manually using two joysticks. The joysticks are used to move the arm to a desired position and a push button is used to close the gripper. Additionally, a record and repeat feature is added in the program which allows the user to record a set of points and movements once and have them repeat continuously. This application of the robot could be used in industrial machines which require repetitive tasks.

Create Your Own Website With Webador